

一、所选电机的性能特点
根据测试特点,旋转角度控制电机所需旋转转矩的大小以及旋转角度最小控制精度随着旋转臂长的变化而不同,电机的额定转矩应大于传感器在最大角度调整位置时对电机的转矩,同时电机每个脉冲对应传感器末端旋转弧所对应弦长应不大于0.5mm,以满足传感器角度调整的需求。
二、电机所需转矩校核计算
干燥箱不同喷嘴间的所成角度的最大值为45°左右,对应角度调整电机对传感器角度调整变化范围为45°。考虑到其它额外因素的影响,在对角度调整电机转矩进行计算时按照最大调整角度为60°来进行设计。选定的皮托管传感器探头重量大约在0.15Kg;传感器探头夹具按长500mm左右,直径为15mm的圆柱杆,重量大约为0.75Kg来进行设计选型。
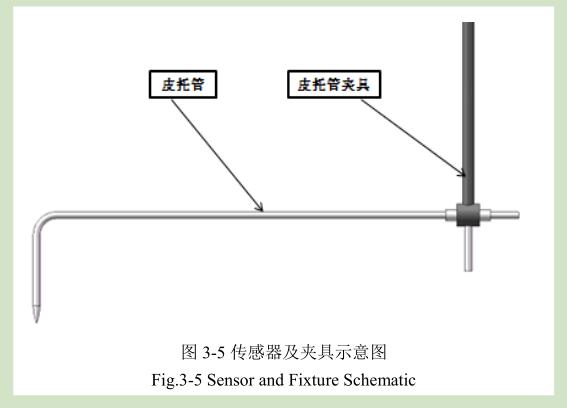
皮托管传感器探头以及传感器夹具对电机的最大转矩为皮托管和夹具处于水平位置时,在此位置时它们对电机旋转轴心的力臂最大,其对应最大转矩为:当皮托管传感器探头处于与直方向夹角最大(大约为30°)喷缝的位置的时候,此时其对应的转矩为:能满足课题的使用要求。
三、电机脉冲分辨率校核计算
在测试过程中,由于是通过在Z方向机械臂末端安装的角度调整电机的旋转来实现对传感器定位,传感器距离电机旋转中心有一定的距离,因此电机的旋转精度控制决定了传感器的定位精度。旋转半径不同时,对角度调整电机单个脉冲所对应旋转角度精度要求不同。
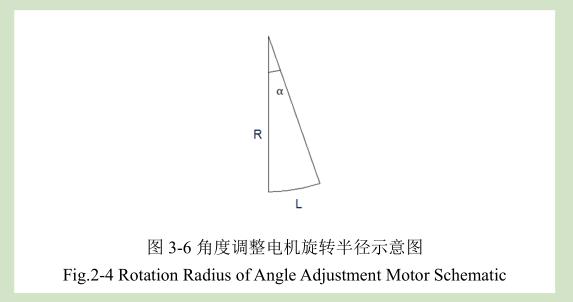
R:传感器绕电机旋转轴心的旋转半径;
α:角度调整电机最小旋转角度;
L:对应旋转半径和最小旋转角度下的有效旋转弧长;

由上表可以看出旋转半径小时角度精度容易保证,半径越大相同转角下对应的弦长就比较大。考虑的到安装的方便性以及在角度调整时的稳定性,旋转臂越小越好,表中旋转臂在200mm-400mm范围时,如取臂长为300mm,取L为0.2mm,电机所能提供的脉冲分辨率必须满足下面要求:为了保证角度调整电机的定位精度,平台角度调整部分所需脉冲分辨率设计指标为0.03°。
四、电机型号确定
由于步进电机在运行过程中的转矩是变化的,而伺服电机在运转过程中转矩是恒定的,为了保持转矩的可靠性,初选迈克彼恩LS伺服系统,伺服电机型号:APM-SBN04A,其对应的额定转矩为1.274N∙m,最大转矩可达3.882N∙m,提供转矩大于传感器角度调整过程中所需转矩,满足使用要求;其配套的原装编码器为15位,当电子齿轮比设定为1:1000时,每个脉冲对应的旋转角度为11°左右,远小于旋转臂为300mm,L为0.2mm时所需的旋转角度精度要求。因此,型号为APM-SBN04A的迈克彼恩LS伺服系统满足角度调整电机选型设计要求。http://www.zhushanzz.com
 粤公网安备 44190002001229号
粤公网安备 44190002001229号