

由于该系统的控制对象为温度和湿度,而温度的特点是变化比较缓慢,惯性比较大,调节比较困难,用一般的PID调节很难适应这种变化,且系统容易大幅振荡;而一些基于神经网络的控制算法在实际应用中还有待检验,其稳定性和收敛的快速性还有待提高,不适合在本系统中采用。故本文采用基于知识的模糊控制算法。同时,模糊控制的稳定性和快速性在实际应用中都已得到验证,对复杂的、难以建立准确数学模型的控制对象有很强的适应性,在实际的生产中有广泛的应用。下面,简单的介绍一下模糊理论。
模糊控制的基本思想就是利用计算机来实现人的控制经验,而人的控制经验一般是用语言来表达的,这些语言表达的控制规则又带有相当的模糊性。我们可以用模糊性的概念来描述被控对象的各个工作状态,以及执行的动作也是模糊的。控制规则的形式正是模糊条件语句的形式,可以用模糊数学的方法,来描述过程变量和控制作用的这些模糊概念及它们之间的关系,又可以根据这种模糊关系将某时刻过程变量的检测值转换成模糊量,用模糊逻辑推理的方法得出此时刻的控制。由于模糊控制的模型不是由数学表达的数学模型,而是由一组模糊条件语句构成的语言形式,因此,模糊控制也被称为模糊语言控制。
模糊控制是基于专家经验和论域知识而总结出的若干条模糊控制规则,构成描述具有不确定性的复杂对象的模糊关系,通过被控系统的输出误差及误差变化和模糊关系的推理合成而得到控制量的一种控制。这种控制方式具有明显的表达知识的特点。模糊控制的模型是由带有模糊性的有关控制人员和专家的控制经验和知识组成的知识模型,是基于知识的控制,因此,模糊控制属于智能控制的范畴。模糊控制是以人的控制经验作为控制的知识模型,以模糊集合,模糊语言变量以及模糊逻辑推理作为控制算法的数学工具,是用计算机来实现的一种智能控制。
一、模糊控制系统
模糊控制系统是以模糊数学、模糊语言形式的知识表示和模糊逻辑的规则推理为理论基础,采用计算机控制技术构成的一种具有反馈通道的闭环控制结构的数学控制系统。因而,模糊控制系统具有常规计算机控制系统的结构形式,如图5.5所示。
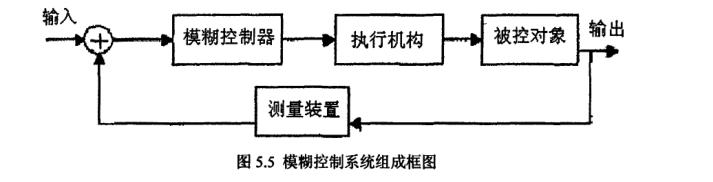
由图可知,模糊控制系统通常由模糊控制器、输入/输出接口、执行机构、被控对象和测量装置的五个部分组成
(1)被控对象:它可以是一种设备或装置以及它们的群体,也可以是一个生产的、自然的、社会的、生物的或其他各种的状态转移过程。这些被控对象可以是确定的或模糊的、单变量的或多变量的、有滞后的或无滞后的,也可以是线性的或非线性的、定常的或时变的、以及具有强耦合的和干扰等多种情况。对于那些难以建立准确数学模型的复杂对象,更适宜采用模糊控制。
(2)执行机构:除了电气的以外,如各类的交、直流电动机、伺服电动机、步进电动机等还有气动的和液压的,如各类气动调节阀和液压马达、液压阀等。
(3)控制器:它是各类自动控制系统中的核心部分。由于被控对象的不同,以及对系统静态、动态特性的要求和所应用的控制规则(或策略)相异,可以构成各种类型的控制器,如在经典控制理论中,用运算放大器加上阻容网络构成的PID控制器和有前馈、反馈环节构成的各种串、并联校正器;在现代控制理论中,设计的有状态观测器、自适应控制器、解耦控制器、鲁棒控制器等。而在模糊控制理论中,则采用基于模糊知识表示和规则推理的语言型“模糊控制器”,这也是模糊控制系统区别于其他控制系统的特征所在。
(4)输入/输出(I/0)接口:在实际系统中,由于多数被控对象的控制量及其可观测状态量是模拟量,因此,模糊控制系统与通常的全数字控制系统或混合控制系统一样,必须具有模/数(A/D)、数/模(D/A)转换单元,不同的只是在模糊控制系统中,还应该有使用于模糊逻辑处理的“模糊化"与“清晰化”(或称为“非模糊化")环节,这部分通常也是被看作模糊控制器的输入/输出接口。
(5)测量装置:它是将被控对象的各种非电量,如流量、温度、压力、速度、浓度等物理量转换为电信号的一种装置。通常由各类数字的或模拟的测量仪器、测量元件或传感器等组成。它在模糊控制系统中占有非常重要的地位,其精度往往直接影响整个系统的性能指标,因此要求其精度高、可靠且稳定性好。
在模糊控制系统中,为了提高控制精度,要及时观测被控量的变化特性及其与期建值间的偏差,以便及时调整控制规则和控制量输出值,因此,往往将测量装置的观测值反馈到系统的输入端,并与给定输入量相比较,构成具有反馈通道的闭环结构。
二、模糊控制器(FC--FuzzyController)
模糊控制系统是一种自动控制系统,它是以模糊数学、模糊语言形式的知识表示和模糊逻辑推理为理论基础,采用计算机控制技术构成的一种具有闭环结构的数字控制系统,它的组成核心是具有智能性的模糊控制器。无疑,模糊逻辑控制系统是一种典型的智能控制系统,在控制原理上它应用模糊集合论、模糊语言变量和模糊逻辑推理知识,模拟人的模糊思维方法,对复杂过程进行控制。模糊逻辑控制的基础是模糊逻辑。模糊逻辑从含义上比其它传统逻辑更接近人类的思想和自然语言。它能够对真实世界的近似的、不确切的特征进行刻画。实际上,模糊逻辑控制是利用模糊逻辑建立一种“自由模型"的非线性控制算法,特别是在那些采用传统定量技术分析过于复杂的过程或者提供的信息是定性、非准确的、非确定的系统中,模糊逻辑控制的效果是相当明显的。由于模糊控制器是模糊控制系统的核心,模糊控制系统的性能优劣,取决于模糊控制器的结构、所采用的模糊算法、合成推理算法,以及模糊决策的方法等因素。
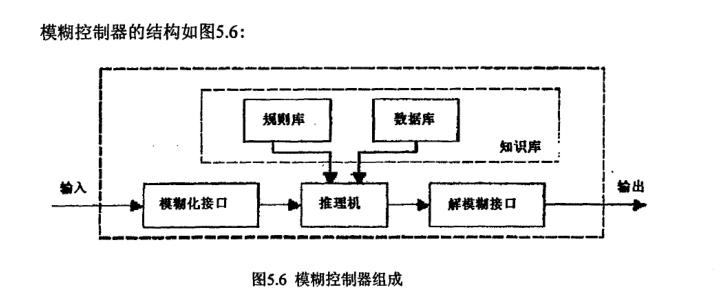
从图中可看出,模糊控制器包含五个部分:输入量模糊化接口、数据库、规则库、推理机和输出解模糊接口。很显然,模糊控制系统在结构上与传统的控制系统没有太大的差别,主要不同之处在于控制器采用了模糊控制器。在设计模糊控制器时,首先是根据被控对象的具体情况来确定模糊控制器的结构。所谓糊控制器的结构指的是它的输入输出变量、模糊化算法、模糊推理规则和准确化计算方法(清晰化)。模糊控制器设计的第一步就是确定控制器的输入输出变量,这在一些简单的控制系统中并没有显示出它的重要性,而对复杂系统来说,模糊控制输入输出变量的选择是极其重要的。模糊化接口是将真实的确定量输入转化成一个模糊矢量;数据库用来存放所有输入、输出变量的全部模糊子集的隶属度值(即经过论域等级的离散化后对应值的集合),若论域为连续域,则为隶属度函数;规则库存放着基于专家知识和手动操作熟练人员长期工作经验的模糊规则,它是按人的直觉推理的一种语言表达形式,通常由一系列的关系词连接而成,关系词必须经过“翻译"才能将模糊规则数值化;推理机根据输入模糊量,由模糊规则完成模糊推理来求解模糊关系方程,从而获得模糊控制量;输出解模糊接口是将经过推理得到的模糊控制量转化为清晰的确定量。由于模糊控制器是采用数字计算机来实现的,所以它应具备以下功能:
(1)把系统偏差从数字量转化为模糊量(模糊化过程、数据库两块完成);
(2)对模糊量由给定的规则进行模糊推理(规则库,推理决策完成);
(3)把推理结果的模糊输出量转化为实际系统能够接受的准确数字量或模拟量。控制设计的主要任务是以被控系统的性能指标作为设计和调节控制器参数的依据。控制器的最终控制性能应该达到预期的目的。一般说来,模糊控制器设计需要考虑的设计参数有:采样频率(根据香农定理和被控过程的技术限制来选择)、量化等级(它严重影响系统的响应,如超调、上升时间、稳态精度等)、隶属度函数的类型和不同隶属度函数之间的重叠率、规则的数目和准确化计算方法。实质上模糊控制器设计的关键在于如何有效地建立知识库即数据库和规则库,决策逻辑控制实际上是依赖规则库来实现的。模糊控制器(模糊推理系统)是直接实现模糊推理算法的专用设备,可以采用软件和硬件两种方式完成一个模糊控制器的功能。当计量比较小时,可以用软件实现模糊控制器。但对于一些计算量大,实时要求高的控制系统,需要用硬件设备直接实现模糊推理,以达到计算迅速,使用简便的目的。模糊逻辑控制是一种利用人的直觉和经验设计的控制系统,与传统控制器设计思想不同,它不需要受控对象的数学解析模型,因此不如经典控制器设计那样有成熟而固定的设计过程和方法。模糊控制器是按一定的语言规则进行工作的,而这些控制规则是建立在总结操作员控制经验的基础上,且大多数模糊逻辑推理方法采用Mamdani极大极小推理法。
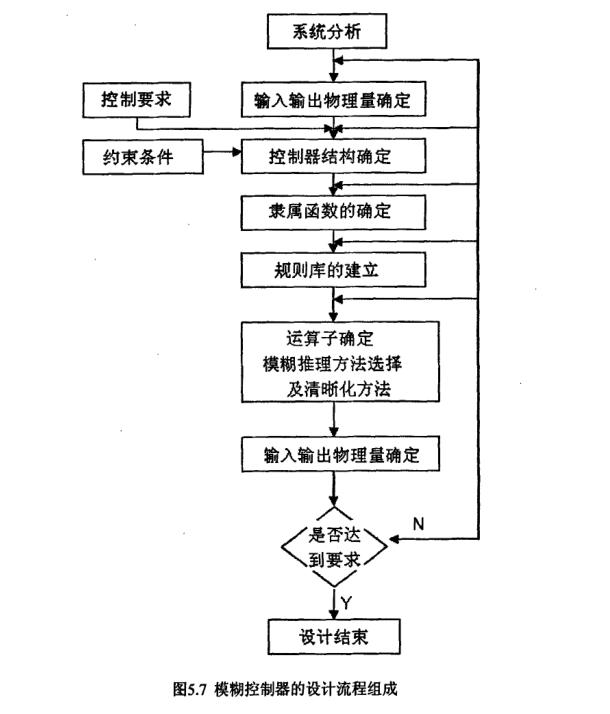
由于被控对象的复杂非线性,难以建立其准确的数学模型,所以有关对象知识的主要来源是领域专家或操作人员的知识和经验。但这些经验并不都是以某种现成的形式存在于这些知识源中可供挑选的。为了从中得到有用的知识,需要做大量的工作,即要把蕴含于知识源中的知识经过理解、选择、归纳等过程抽取出来,用于形成经验型的知识模型或知识库,称知识获取,从而确定模糊控制其的输入变量和输出变量以及它们的数值变化范围。在系统综合设计阶段,需要根据实际问题进行具体分析,如自动操作的约束条件、工艺要求和控制品质要求等,然后确定模糊控制其的结构,这一部的工作是十分关键的,因为总体设计思想的正确与否关系到系统控制效果实现的成败,在控制器实现阶段,要对输入值和输出变量的隶属函数进行定义,建立控制,进行运算子的确立和选择清晰化方法,然后根据它们进行模糊化、模糊推理和清晰化的操作,从而实现模糊控制。最后进行离线仿真研究和在现实是模拟试验,检验所涉及的模糊控制器是否达到预定的控制目标。如果没有达到要求,就要对控制器的结构、隶属函数、推理方法等进行重新设计或调整。设计时要调整的参数有:控制器结构;隶属函数的形状、位置;规则和隶属度;模糊推理的运算子;清晰化方法。糊控制器的设计流程如图所示:
三、模糊控制器工作原理
当人们进行控制活动时,首先必须对系统的输出误差和误差变化率进行判断和权衡。当误差为负大,误差变化率也为负大时,这是的控制量应选正大。如果误差仍然是负大,而误差变化率为正大时,这时即使不改变控制量,误差也将会变小。所以当操作者进行控制工作时,所设计的模糊概念的论域基本上有下列三个:误差E,误差变化率EC和人们期望的控制输出量U。当用模糊控制器代替人进行模糊控制时,误差E,误差变化率EC是准确量,由于模糊控制其本身不会思考,因此存在准确量和模糊量之间的转换的过程,必须把准确的输入量E和误差变化率EC变为模糊量,然后输入给模糊控制器,模糊控制器是一个模糊集合的运算的过程,产生模糊输出,再经过模糊判决给出控制量U的准确值,去控制工业过程。我们把准确量化为模糊量的过程称为模糊化,把模糊集变为准确量的过程称为模糊判决。这两个转换过程都涉及到模糊集中隶属函数求取的问题,在实际应用中,隶属函数的求取可以通过总结操作者的经验或用实验方法来求取。综上所述,模糊控制算法可概括为下述四个步骤
(1)根据当前采样得到的系统输出值,和设定值比较,计算出选择的系统的输入变量,包括误差E和误差变化率EC;
(2)将输入变量的准确值变为模糊量。
(3)根据输入变量(模糊量)及模糊控制规则(由模糊条件语句组成),按模糊推理合成规则计算控制量(模糊量)。
(4)由上述得到的控制量(模糊量)计算准确的控制量。
四、模糊控制的优点
(1)在设计系统时不需要建立被控对象的数学模型,只要求掌握现场操作人员或有关专家的经验、知识或者操作数据;
(2)系统的鲁棒性强,尤其是适合于非线性、时变、滞后系统的控制;
(3)由工业过程的定性认识出发,较容易建立语言变量控制规则;
(4)由不同观点出发,可以设计几个不同的指标函数,但对一个给定系统而言,其语言控制规则是分别独立的,且通过整个控制系统的协调可以取得总体的协调控制;
(5)控制效果比较好,且所需设备简单,经济效益显著。http://www.zhushanzz.com
 粤公网安备 44190002001229号
粤公网安备 44190002001229号